Example: Guided Mode Movement and Commands (Copter)¶
This example shows how to control Copter movement and send immediate commands in GUIDED mode. It demonstrates three methods for explicitly specifying a target position and two commands for controlling movement by setting the vehicle’s velocity vectors. It also shows how to send commands to control the yaw (direction that the front of the vehicle is pointing), region of interest, speed and home location, along with some useful functions for converting between frames of reference.
The example is documented in the source code. More detailed information about using GUIDED mode can be found in the guide: Guiding and Controlling Copter.
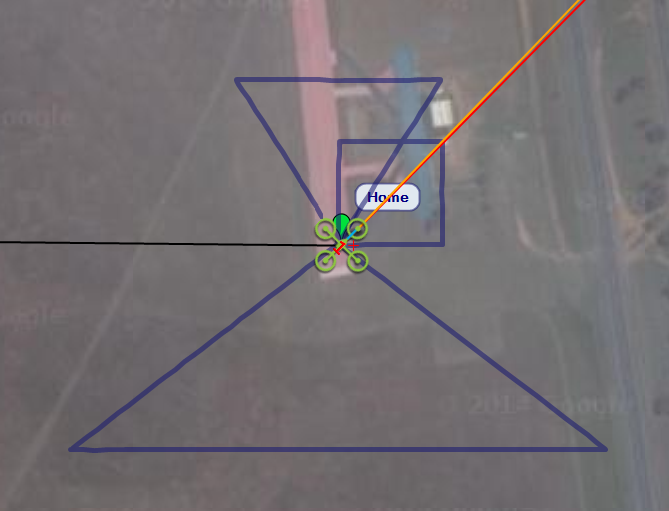
Setting destination using position and changing speed and ROI
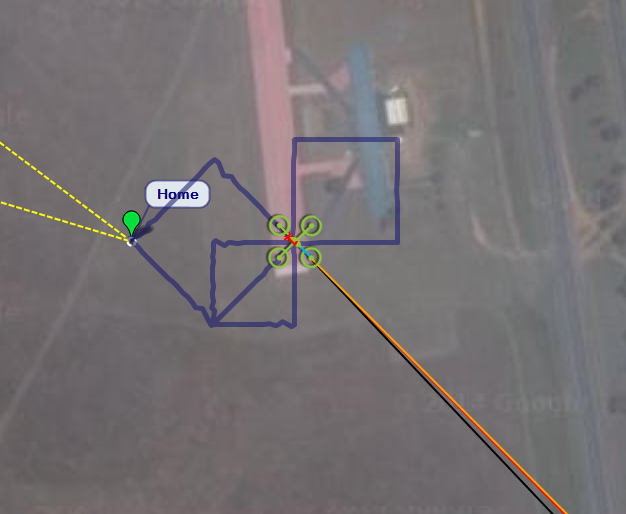
Setting destination using velocity and changing yaw and home location
Running the example¶
The example can be run as described in Running the Examples (which in turn assumes that the vehicle and DroneKit have been set up as described in Installing DroneKit).
In summary, after cloning the repository:
Navigate to the example folder as shown:
cd dronekit-python/examples/guided_set_speed_yaw/You can run the example against a simulator (DroneKit-SITL) by specifying the Python script without any arguments. The example will download SITL binaries if needed, start the simulator, and then connect to it:
python guided_set_speed_yaw.py
On the command prompt you should see (something like):
Starting copter simulator (SITL) SITL already Downloaded. Connecting to vehicle on: tcp:127.0.0.1:5760 >>> APM:Copter V3.3 (d6053245) >>> Frame: QUAD >>> Calibrating barometer >>> Initialising APM... >>> barometer calibration complete >>> GROUND START Basic pre-arm checks Waiting for vehicle to initialise... ... Waiting for vehicle to initialise... Arming motors Waiting for arming... ... Waiting for arming... >>> ARMING MOTORS >>> GROUND START Waiting for arming... >>> Link timeout, no heartbeat in last 5 seconds >>> ...link restored. >>> Initialising APM... Taking off! Altitude: 0.0 Altitude: 0.28 ... Altitude: 4.76 Reached target altitude TRIANGLE path using standard Vehicle.simple_goto() Set groundspeed to 5m/s. Position North 80 West 50 Distance to target: 100.792763565 Distance to target: 99.912599325 ... Distance to target: 1.21731863826 Distance to target: 0.846001925791 Reached target Position North 0 East 100 Distance to target: 122.623210813 ... Distance to target: 4.75876224557 Distance to target: 0.244650555031 Reached target Position North -80 West 50 Distance to target: 100.792430814 Distance to target: 100.592652053 ... Distance to target: 2.48849019535 Distance to target: 0.73822537077 Reached target TRIANGLE path using standard SET_POSITION_TARGET_GLOBAL_INT message and with varying speed. Position South 100 West 130 Set groundspeed to 5m/s. Distance to target: 188.180927131 Distance to target: 186.578341133 ... Distance to target: 9.87090024758 Distance to target: 1.4668164732 Reached target Set groundspeed to 15m/s (max). Position South 0 East 200 Distance to target: 318.826732298 Distance to target: 320.787965033 ... Distance to target: 11.5626483964 Distance to target: 0.335164775811 Reached target Set airspeed to 10m/s (max). Position North 100 West 130 Distance to target: 188.182420209 Distance to target: 189.860730713 ... Distance to target: 10.4263414971 Distance to target: 1.29857175712 Reached target SQUARE path using SET_POSITION_TARGET_LOCAL_NED and position parameters North 50m, East 0m, 10m altitude for 20 seconds Point ROI at current location (home position) North 50m, East 50m, 10m altitude Point ROI at current location North 0m, East 50m, 10m altitude North 0m, East 0m, 10m altitude SQUARE path using SET_POSITION_TARGET_LOCAL_NED and velocity parameters Yaw 180 absolute (South) Velocity South & up Yaw 270 absolute (West) Velocity West & down Yaw 0 absolute (North) Velocity North Yaw 90 absolute (East) Velocity East DIAMOND path using SET_POSITION_TARGET_GLOBAL_INT and velocity parameters Yaw 225 absolute Velocity South, West and Up Yaw 90 relative (to previous yaw heading) Velocity North, West and Down Set new home location to current location Get new home location Home Location: LocationGlobal:lat=-35.363243103,lon=149.164337158,alt=593.890014648 Yaw 90 relative (to previous yaw heading) Velocity North and East Yaw 90 relative (to previous yaw heading) Velocity South and East Setting LAND mode... Close vehicle object Completed
Tip
It is more interesting to watch the example run on a map than the console. The topic Connecting an additional Ground Station explains how to set up Mission Planner to view a vehicle running on the simulator (SITL).
You can run the example against a specific connection (simulated or otherwise) by passing the connection string for your vehicle in the
--connectparameter.For example, to connect to SITL running on UDP port 14550 on your local computer:
python guided_set_speed_yaw.py --connect 127.0.0.1:14550
How does it work?¶
The example is documented in source code. Additional information on the methods is provided either below or in the guide.
The functions for controlling vehicle movement are:
- Vehicle.simple_goto() is the standard DroneKit position controller method. It is called from goto to fly a triangular path.
- goto_position_target_global_int() is a position controller that uses the SET_POSITION_TARGET_GLOBAL_INT command.
- goto_position_target_local_ned() is a position controller that uses SET_POSITION_TARGET_LOCAL_NED command (taking values in NED frame, relative to the home position). This is used to fly a square path. The script is put to sleep for a certain time in order to allow the vehicle to reach the specified position.
- send_ned_velocity() is a velocity controller. It uses SET_POSITION_TARGET_LOCAL_NED to fly a square path using velocity vectors to define the speed in each direction.
- send_global_velocity() is a velocity controller.
It uses SET_POSITION_TARGET_GLOBAL_INT
to fly a diamond-shaped path. The behaviour is essentially the same as for
send_ned_velocity()because the velocity components in both commands are in the NED frame. - goto is a convenience function for specifying a target location in metres from the current location and reporting the result.
The functions sending immediate commands are:
The example uses a number functions to convert global locations co-ordinates (decimal degrees) into local coordinates relative to the vehicle (in metres). These are described in the guide.
goto() - convenience function¶
This is a convenience function for setting position targets in metres North and East of the current location. It reports the distance to the target every two seconds and completes when the target is reached.
This takes a function argument of either Vehicle.simple_goto() or goto_position_target_global_int()
def goto(dNorth, dEast, gotoFunction=vehicle.simple_goto):
currentLocation=vehicle.location.global_relative_frame
targetLocation=get_location_metres(currentLocation, dNorth, dEast)
targetDistance=get_distance_metres(currentLocation, targetLocation)
gotoFunction(targetLocation)
while vehicle.mode.name=="GUIDED": #Stop action if we are no longer in guided mode.
remainingDistance=get_distance_metres(vehicle.location.global_frame, targetLocation)
print "Distance to target: ", remainingDistance
if remainingDistance<=targetDistance*0.01: #Just below target, in case of undershoot.
print "Reached target"
break;
time.sleep(2)
send_ned_velocity()¶
The function send_ned_velocity() generates a SET_POSITION_TARGET_LOCAL_NED MAVLink message
which is used to directly specify the speed components of the vehicle.
The message is resent at 1Hz for a set duration.
This is documented in the guide here.
send_global_velocity()¶
The function send_global_velocity() generates a
SET_POSITION_TARGET_GLOBAL_INT
MAVLink message which is used to directly specify the speed components of the vehicle in the NED
frame.
The function behaviour is otherwise exactly the same as when using SET_POSITION_TARGET_LOCAL_NED.
def send_global_velocity(velocity_x, velocity_y, velocity_z, duration):
"""
Move vehicle in direction based on specified velocity vectors.
"""
msg = vehicle.message_factory.set_position_target_global_int_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT_INT, # frame
0b0000111111000111, # type_mask (only speeds enabled)
0, # lat_int - X Position in WGS84 frame in 1e7 * meters
0, # lon_int - Y Position in WGS84 frame in 1e7 * meters
0, # alt - Altitude in meters in AMSL altitude(not WGS84 if absolute or relative)
# altitude above terrain if GLOBAL_TERRAIN_ALT_INT
velocity_x, # X velocity in NED frame in m/s
velocity_y, # Y velocity in NED frame in m/s
velocity_z, # Z velocity in NED frame in m/s
0, 0, 0, # afx, afy, afz acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle on 1 Hz cycle
for x in range(0,duration):
vehicle.send_mavlink(msg)
time.sleep(1)
Note
The message is re-sent every second for the specified duration. From Copter 3.3 the vehicle will stop moving if a new message is not received in approximately 3 seconds. Prior to Copter 3.3 the message only needs to be sent once, and the velocity remains active until the next movement message is received. The above code works for both cases!
goto_position_target_global_int()¶
The function goto_position_target_global_int() generates a
SET_POSITION_TARGET_GLOBAL_INT
MAVLink message which is used to directly specify the target location of the vehicle.
When used with MAV_FRAME_GLOBAL_RELATIVE_ALT_INT as shown below,
this method is effectively the same as Vehicle.simple_goto.
def goto_position_target_global_int(aLocation):
"""
Send SET_POSITION_TARGET_GLOBAL_INT command to request the vehicle fly to a specified location.
"""
msg = vehicle.message_factory.set_position_target_global_int_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT_INT, # frame
0b0000111111111000, # type_mask (only speeds enabled)
aLocation.lat*1e7, # lat_int - X Position in WGS84 frame in 1e7 * meters
aLocation.lon*1e7, # lon_int - Y Position in WGS84 frame in 1e7 * meters
aLocation.alt, # alt - Altitude in meters in AMSL altitude, not WGS84 if absolute or relative, above terrain if GLOBAL_TERRAIN_ALT_INT
0, # X velocity in NED frame in m/s
0, # Y velocity in NED frame in m/s
0, # Z velocity in NED frame in m/s
0, 0, 0, # afx, afy, afz acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle
vehicle.send_mavlink(msg)
In the example code this function is called from the goto() convenience function.
goto_position_target_local_ned()¶
The function goto_position_target_local_ned() generates a
SET_POSITION_TARGET_LOCAL_NED
MAVLink message which is used to directly specify the target location in the North, East, Down frame.
The type_mask enables the position parameters (the last three bits of of the mask are zero).
Warning
In the NED frame positive altitudes are entered as negative “Down” values. So if down is “10”, this will be 10 metres below the home altitude.
Note
The MAVLink protocol documentation lists a number of possible frames of reference. Up until Copter 3.2.1 the actual frame used is always relative to the home location (as indicated by MAV_FRAME_LOCAL_NED). Starting from Copter 3.3 you can specify other frames, for example to move the vehicle relative to its current position.
def goto_position_target_local_ned(north, east, down):
"""
Send SET_POSITION_TARGET_LOCAL_NED command to request the vehicle fly to a specified
location in the North, East, Down frame.
"""
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_LOCAL_NED, # frame
0b0000111111111000, # type_mask (only positions enabled)
north, east, down,
0, 0, 0, # x, y, z velocity in m/s (not used)
0, 0, 0, # x, y, z acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle
vehicle.send_mavlink(msg)
At time of writing, acceleration and yaw bits are ignored.
Testbed settings¶
This example has been tested on Windows against SITL running both natively and in a virtual machine (as described in Installing DroneKit).
- DroneKit version: 2.0.2
- ArduPilot version: 3.3
Source code¶
The full source code at documentation build-time is listed below (current version on Github):
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""
© Copyright 2015-2016, 3D Robotics.
guided_set_speed_yaw.py: (Copter Only)
This example shows how to move/direct Copter and send commands in GUIDED mode using DroneKit Python.
Example documentation: http://python.dronekit.io/examples/guided-set-speed-yaw-demo.html
"""
from __future__ import print_function
from dronekit import connect, VehicleMode, LocationGlobal, LocationGlobalRelative
from pymavlink import mavutil # Needed for command message definitions
import time
import math
#Set up option parsing to get connection string
import argparse
parser = argparse.ArgumentParser(description='Control Copter and send commands in GUIDED mode ')
parser.add_argument('--connect',
help="Vehicle connection target string. If not specified, SITL automatically started and used.")
args = parser.parse_args()
connection_string = args.connect
sitl = None
#Start SITL if no connection string specified
if not connection_string:
import dronekit_sitl
sitl = dronekit_sitl.start_default()
connection_string = sitl.connection_string()
# Connect to the Vehicle
print('Connecting to vehicle on: %s' % connection_string)
vehicle = connect(connection_string, wait_ready=True)
def arm_and_takeoff(aTargetAltitude):
"""
Arms vehicle and fly to aTargetAltitude.
"""
print("Basic pre-arm checks")
# Don't let the user try to arm until autopilot is ready
while not vehicle.is_armable:
print(" Waiting for vehicle to initialise...")
time.sleep(1)
print("Arming motors")
# Copter should arm in GUIDED mode
vehicle.mode = VehicleMode("GUIDED")
vehicle.armed = True
while not vehicle.armed:
print(" Waiting for arming...")
time.sleep(1)
print("Taking off!")
vehicle.simple_takeoff(aTargetAltitude) # Take off to target altitude
# Wait until the vehicle reaches a safe height before processing the goto (otherwise the command
# after Vehicle.simple_takeoff will execute immediately).
while True:
print(" Altitude: ", vehicle.location.global_relative_frame.alt)
if vehicle.location.global_relative_frame.alt>=aTargetAltitude*0.95: #Trigger just below target alt.
print("Reached target altitude")
break
time.sleep(1)
#Arm and take of to altitude of 5 meters
arm_and_takeoff(5)
"""
Convenience functions for sending immediate/guided mode commands to control the Copter.
The set of commands demonstrated here include:
* MAV_CMD_CONDITION_YAW - set direction of the front of the Copter (latitude, longitude)
* MAV_CMD_DO_SET_ROI - set direction where the camera gimbal is aimed (latitude, longitude, altitude)
* MAV_CMD_DO_CHANGE_SPEED - set target speed in metres/second.
The full set of available commands are listed here:
http://dev.ardupilot.com/wiki/copter-commands-in-guided-mode/
"""
def condition_yaw(heading, relative=False):
"""
Send MAV_CMD_CONDITION_YAW message to point vehicle at a specified heading (in degrees).
This method sets an absolute heading by default, but you can set the `relative` parameter
to `True` to set yaw relative to the current yaw heading.
By default the yaw of the vehicle will follow the direction of travel. After setting
the yaw using this function there is no way to return to the default yaw "follow direction
of travel" behaviour (https://github.com/diydrones/ardupilot/issues/2427)
For more information see:
http://copter.ardupilot.com/wiki/common-mavlink-mission-command-messages-mav_cmd/#mav_cmd_condition_yaw
"""
if relative:
is_relative = 1 #yaw relative to direction of travel
else:
is_relative = 0 #yaw is an absolute angle
# create the CONDITION_YAW command using command_long_encode()
msg = vehicle.message_factory.command_long_encode(
0, 0, # target system, target component
mavutil.mavlink.MAV_CMD_CONDITION_YAW, #command
0, #confirmation
heading, # param 1, yaw in degrees
0, # param 2, yaw speed deg/s
1, # param 3, direction -1 ccw, 1 cw
is_relative, # param 4, relative offset 1, absolute angle 0
0, 0, 0) # param 5 ~ 7 not used
# send command to vehicle
vehicle.send_mavlink(msg)
def set_roi(location):
"""
Send MAV_CMD_DO_SET_ROI message to point camera gimbal at a
specified region of interest (LocationGlobal).
The vehicle may also turn to face the ROI.
For more information see:
http://copter.ardupilot.com/common-mavlink-mission-command-messages-mav_cmd/#mav_cmd_do_set_roi
"""
# create the MAV_CMD_DO_SET_ROI command
msg = vehicle.message_factory.command_long_encode(
0, 0, # target system, target component
mavutil.mavlink.MAV_CMD_DO_SET_ROI, #command
0, #confirmation
0, 0, 0, 0, #params 1-4
location.lat,
location.lon,
location.alt
)
# send command to vehicle
vehicle.send_mavlink(msg)
"""
Functions to make it easy to convert between the different frames-of-reference. In particular these
make it easy to navigate in terms of "metres from the current position" when using commands that take
absolute positions in decimal degrees.
The methods are approximations only, and may be less accurate over longer distances, and when close
to the Earth's poles.
Specifically, it provides:
* get_location_metres - Get LocationGlobal (decimal degrees) at distance (m) North & East of a given LocationGlobal.
* get_distance_metres - Get the distance between two LocationGlobal objects in metres
* get_bearing - Get the bearing in degrees to a LocationGlobal
"""
def get_location_metres(original_location, dNorth, dEast):
"""
Returns a LocationGlobal object containing the latitude/longitude `dNorth` and `dEast` metres from the
specified `original_location`. The returned LocationGlobal has the same `alt` value
as `original_location`.
The function is useful when you want to move the vehicle around specifying locations relative to
the current vehicle position.
The algorithm is relatively accurate over small distances (10m within 1km) except close to the poles.
For more information see:
http://gis.stackexchange.com/questions/2951/algorithm-for-offsetting-a-latitude-longitude-by-some-amount-of-meters
"""
earth_radius = 6378137.0 #Radius of "spherical" earth
#Coordinate offsets in radians
dLat = dNorth/earth_radius
dLon = dEast/(earth_radius*math.cos(math.pi*original_location.lat/180))
#New position in decimal degrees
newlat = original_location.lat + (dLat * 180/math.pi)
newlon = original_location.lon + (dLon * 180/math.pi)
if type(original_location) is LocationGlobal:
targetlocation=LocationGlobal(newlat, newlon,original_location.alt)
elif type(original_location) is LocationGlobalRelative:
targetlocation=LocationGlobalRelative(newlat, newlon,original_location.alt)
else:
raise Exception("Invalid Location object passed")
return targetlocation;
def get_distance_metres(aLocation1, aLocation2):
"""
Returns the ground distance in metres between two LocationGlobal objects.
This method is an approximation, and will not be accurate over large distances and close to the
earth's poles. It comes from the ArduPilot test code:
https://github.com/diydrones/ardupilot/blob/master/Tools/autotest/common.py
"""
dlat = aLocation2.lat - aLocation1.lat
dlong = aLocation2.lon - aLocation1.lon
return math.sqrt((dlat*dlat) + (dlong*dlong)) * 1.113195e5
def get_bearing(aLocation1, aLocation2):
"""
Returns the bearing between the two LocationGlobal objects passed as parameters.
This method is an approximation, and may not be accurate over large distances and close to the
earth's poles. It comes from the ArduPilot test code:
https://github.com/diydrones/ardupilot/blob/master/Tools/autotest/common.py
"""
off_x = aLocation2.lon - aLocation1.lon
off_y = aLocation2.lat - aLocation1.lat
bearing = 90.00 + math.atan2(-off_y, off_x) * 57.2957795
if bearing < 0:
bearing += 360.00
return bearing;
"""
Functions to move the vehicle to a specified position (as opposed to controlling movement by setting velocity components).
The methods include:
* goto_position_target_global_int - Sets position using SET_POSITION_TARGET_GLOBAL_INT command in
MAV_FRAME_GLOBAL_RELATIVE_ALT_INT frame
* goto_position_target_local_ned - Sets position using SET_POSITION_TARGET_LOCAL_NED command in
MAV_FRAME_BODY_NED frame
* goto - A convenience function that can use Vehicle.simple_goto (default) or
goto_position_target_global_int to travel to a specific position in metres
North and East from the current location.
This method reports distance to the destination.
"""
def goto_position_target_global_int(aLocation):
"""
Send SET_POSITION_TARGET_GLOBAL_INT command to request the vehicle fly to a specified LocationGlobal.
For more information see: https://pixhawk.ethz.ch/mavlink/#SET_POSITION_TARGET_GLOBAL_INT
See the above link for information on the type_mask (0=enable, 1=ignore).
At time of writing, acceleration and yaw bits are ignored.
"""
msg = vehicle.message_factory.set_position_target_global_int_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT_INT, # frame
0b0000111111111000, # type_mask (only speeds enabled)
aLocation.lat*1e7, # lat_int - X Position in WGS84 frame in 1e7 * meters
aLocation.lon*1e7, # lon_int - Y Position in WGS84 frame in 1e7 * meters
aLocation.alt, # alt - Altitude in meters in AMSL altitude, not WGS84 if absolute or relative, above terrain if GLOBAL_TERRAIN_ALT_INT
0, # X velocity in NED frame in m/s
0, # Y velocity in NED frame in m/s
0, # Z velocity in NED frame in m/s
0, 0, 0, # afx, afy, afz acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle
vehicle.send_mavlink(msg)
def goto_position_target_local_ned(north, east, down):
"""
Send SET_POSITION_TARGET_LOCAL_NED command to request the vehicle fly to a specified
location in the North, East, Down frame.
It is important to remember that in this frame, positive altitudes are entered as negative
"Down" values. So if down is "10", this will be 10 metres below the home altitude.
Starting from AC3.3 the method respects the frame setting. Prior to that the frame was
ignored. For more information see:
http://dev.ardupilot.com/wiki/copter-commands-in-guided-mode/#set_position_target_local_ned
See the above link for information on the type_mask (0=enable, 1=ignore).
At time of writing, acceleration and yaw bits are ignored.
"""
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_LOCAL_NED, # frame
0b0000111111111000, # type_mask (only positions enabled)
north, east, down, # x, y, z positions (or North, East, Down in the MAV_FRAME_BODY_NED frame
0, 0, 0, # x, y, z velocity in m/s (not used)
0, 0, 0, # x, y, z acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle
vehicle.send_mavlink(msg)
def goto(dNorth, dEast, gotoFunction=vehicle.simple_goto):
"""
Moves the vehicle to a position dNorth metres North and dEast metres East of the current position.
The method takes a function pointer argument with a single `dronekit.lib.LocationGlobal` parameter for
the target position. This allows it to be called with different position-setting commands.
By default it uses the standard method: dronekit.lib.Vehicle.simple_goto().
The method reports the distance to target every two seconds.
"""
currentLocation = vehicle.location.global_relative_frame
targetLocation = get_location_metres(currentLocation, dNorth, dEast)
targetDistance = get_distance_metres(currentLocation, targetLocation)
gotoFunction(targetLocation)
#print "DEBUG: targetLocation: %s" % targetLocation
#print "DEBUG: targetLocation: %s" % targetDistance
while vehicle.mode.name=="GUIDED": #Stop action if we are no longer in guided mode.
#print "DEBUG: mode: %s" % vehicle.mode.name
remainingDistance=get_distance_metres(vehicle.location.global_relative_frame, targetLocation)
print("Distance to target: ", remainingDistance)
if remainingDistance<=targetDistance*0.01: #Just below target, in case of undershoot.
print("Reached target")
break;
time.sleep(2)
"""
Functions that move the vehicle by specifying the velocity components in each direction.
The two functions use different MAVLink commands. The main difference is
that depending on the frame used, the NED velocity can be relative to the vehicle
orientation.
The methods include:
* send_ned_velocity - Sets velocity components using SET_POSITION_TARGET_LOCAL_NED command
* send_global_velocity - Sets velocity components using SET_POSITION_TARGET_GLOBAL_INT command
"""
def send_ned_velocity(velocity_x, velocity_y, velocity_z, duration):
"""
Move vehicle in direction based on specified velocity vectors and
for the specified duration.
This uses the SET_POSITION_TARGET_LOCAL_NED command with a type mask enabling only
velocity components
(http://dev.ardupilot.com/wiki/copter-commands-in-guided-mode/#set_position_target_local_ned).
Note that from AC3.3 the message should be re-sent every second (after about 3 seconds
with no message the velocity will drop back to zero). In AC3.2.1 and earlier the specified
velocity persists until it is canceled. The code below should work on either version
(sending the message multiple times does not cause problems).
See the above link for information on the type_mask (0=enable, 1=ignore).
At time of writing, acceleration and yaw bits are ignored.
"""
msg = vehicle.message_factory.set_position_target_local_ned_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_LOCAL_NED, # frame
0b0000111111000111, # type_mask (only speeds enabled)
0, 0, 0, # x, y, z positions (not used)
velocity_x, velocity_y, velocity_z, # x, y, z velocity in m/s
0, 0, 0, # x, y, z acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle on 1 Hz cycle
for x in range(0,duration):
vehicle.send_mavlink(msg)
time.sleep(1)
def send_global_velocity(velocity_x, velocity_y, velocity_z, duration):
"""
Move vehicle in direction based on specified velocity vectors.
This uses the SET_POSITION_TARGET_GLOBAL_INT command with type mask enabling only
velocity components
(http://dev.ardupilot.com/wiki/copter-commands-in-guided-mode/#set_position_target_global_int).
Note that from AC3.3 the message should be re-sent every second (after about 3 seconds
with no message the velocity will drop back to zero). In AC3.2.1 and earlier the specified
velocity persists until it is canceled. The code below should work on either version
(sending the message multiple times does not cause problems).
See the above link for information on the type_mask (0=enable, 1=ignore).
At time of writing, acceleration and yaw bits are ignored.
"""
msg = vehicle.message_factory.set_position_target_global_int_encode(
0, # time_boot_ms (not used)
0, 0, # target system, target component
mavutil.mavlink.MAV_FRAME_GLOBAL_RELATIVE_ALT_INT, # frame
0b0000111111000111, # type_mask (only speeds enabled)
0, # lat_int - X Position in WGS84 frame in 1e7 * meters
0, # lon_int - Y Position in WGS84 frame in 1e7 * meters
0, # alt - Altitude in meters in AMSL altitude(not WGS84 if absolute or relative)
# altitude above terrain if GLOBAL_TERRAIN_ALT_INT
velocity_x, # X velocity in NED frame in m/s
velocity_y, # Y velocity in NED frame in m/s
velocity_z, # Z velocity in NED frame in m/s
0, 0, 0, # afx, afy, afz acceleration (not supported yet, ignored in GCS_Mavlink)
0, 0) # yaw, yaw_rate (not supported yet, ignored in GCS_Mavlink)
# send command to vehicle on 1 Hz cycle
for x in range(0,duration):
vehicle.send_mavlink(msg)
time.sleep(1)
"""
Fly a triangular path using the standard Vehicle.simple_goto() method.
The method is called indirectly via a custom "goto" that allows the target position to be
specified as a distance in metres (North/East) from the current position, and which reports
the distance-to-target.
"""
print("TRIANGLE path using standard Vehicle.simple_goto()")
print("Set groundspeed to 5m/s.")
vehicle.groundspeed=5
print("Position North 80 West 50")
goto(80, -50)
print("Position North 0 East 100")
goto(0, 100)
print("Position North -80 West 50")
goto(-80, -50)
"""
Fly a triangular path using the SET_POSITION_TARGET_GLOBAL_INT command and specifying
a target position (rather than controlling movement using velocity vectors). The command is
called from goto_position_target_global_int() (via `goto`).
The goto_position_target_global_int method is called indirectly from a custom "goto" that allows
the target position to be specified as a distance in metres (North/East) from the current position,
and which reports the distance-to-target.
The code also sets the speed (MAV_CMD_DO_CHANGE_SPEED). In AC3.2.1 Copter will accelerate to this speed
near the centre of its journey and then decelerate as it reaches the target.
In AC3.3 the speed changes immediately.
"""
print("TRIANGLE path using standard SET_POSITION_TARGET_GLOBAL_INT message and with varying speed.")
print("Position South 100 West 130")
print("Set groundspeed to 5m/s.")
vehicle.groundspeed = 5
goto(-100, -130, goto_position_target_global_int)
print("Set groundspeed to 15m/s (max).")
vehicle.groundspeed = 15
print("Position South 0 East 200")
goto(0, 260, goto_position_target_global_int)
print("Set airspeed to 10m/s (max).")
vehicle.airspeed = 10
print("Position North 100 West 130")
goto(100, -130, goto_position_target_global_int)
"""
Fly the vehicle in a 50m square path, using the SET_POSITION_TARGET_LOCAL_NED command
and specifying a target position (rather than controlling movement using velocity vectors).
The command is called from goto_position_target_local_ned() (via `goto`).
The position is specified in terms of the NED (North East Down) relative to the Home location.
WARNING: The "D" in NED means "Down". Using a positive D value will drive the vehicle into the ground!
The code sleeps for a time (DURATION) to give the vehicle time to reach each position (rather than
sending commands based on proximity).
The code also sets the region of interest (MAV_CMD_DO_SET_ROI) via the `set_roi()` method. This points the
camera gimbal at the the selected location (in this case it aligns the whole vehicle to point at the ROI).
"""
print("SQUARE path using SET_POSITION_TARGET_LOCAL_NED and position parameters")
DURATION = 20 #Set duration for each segment.
print("North 50m, East 0m, 10m altitude for %s seconds" % DURATION)
goto_position_target_local_ned(50,0,-10)
print("Point ROI at current location (home position)")
# NOTE that this has to be called after the goto command as first "move" command of a particular type
# "resets" ROI/YAW commands
set_roi(vehicle.location.global_relative_frame)
time.sleep(DURATION)
print("North 50m, East 50m, 10m altitude")
goto_position_target_local_ned(50,50,-10)
time.sleep(DURATION)
print("Point ROI at current location")
set_roi(vehicle.location.global_relative_frame)
print("North 0m, East 50m, 10m altitude")
goto_position_target_local_ned(0,50,-10)
time.sleep(DURATION)
print("North 0m, East 0m, 10m altitude")
goto_position_target_local_ned(0,0,-10)
time.sleep(DURATION)
"""
Fly the vehicle in a SQUARE path using velocity vectors (the underlying code calls the
SET_POSITION_TARGET_LOCAL_NED command with the velocity parameters enabled).
The thread sleeps for a time (DURATION) which defines the distance that will be travelled.
The code also sets the yaw (MAV_CMD_CONDITION_YAW) using the `set_yaw()` method in each segment
so that the front of the vehicle points in the direction of travel
"""
#Set up velocity vector to map to each direction.
# vx > 0 => fly North
# vx < 0 => fly South
NORTH = 2
SOUTH = -2
# Note for vy:
# vy > 0 => fly East
# vy < 0 => fly West
EAST = 2
WEST = -2
# Note for vz:
# vz < 0 => ascend
# vz > 0 => descend
UP = -0.5
DOWN = 0.5
# Square path using velocity
print("SQUARE path using SET_POSITION_TARGET_LOCAL_NED and velocity parameters")
print("Yaw 180 absolute (South)")
condition_yaw(180)
print("Velocity South & up")
send_ned_velocity(SOUTH,0,UP,DURATION)
send_ned_velocity(0,0,0,1)
print("Yaw 270 absolute (West)")
condition_yaw(270)
print("Velocity West & down")
send_ned_velocity(0,WEST,DOWN,DURATION)
send_ned_velocity(0,0,0,1)
print("Yaw 0 absolute (North)")
condition_yaw(0)
print("Velocity North")
send_ned_velocity(NORTH,0,0,DURATION)
send_ned_velocity(0,0,0,1)
print("Yaw 90 absolute (East)")
condition_yaw(90)
print("Velocity East")
send_ned_velocity(0,EAST,0,DURATION)
send_ned_velocity(0,0,0,1)
"""
Fly the vehicle in a DIAMOND path using velocity vectors (the underlying code calls the
SET_POSITION_TARGET_GLOBAL_INT command with the velocity parameters enabled).
The thread sleeps for a time (DURATION) which defines the distance that will be travelled.
The code sets the yaw (MAV_CMD_CONDITION_YAW) using the `set_yaw()` method using relative headings
so that the front of the vehicle points in the direction of travel.
At the end of the second segment the code sets a new home location to the current point.
"""
print("DIAMOND path using SET_POSITION_TARGET_GLOBAL_INT and velocity parameters")
# vx, vy are parallel to North and East (independent of the vehicle orientation)
print("Yaw 225 absolute")
condition_yaw(225)
print("Velocity South, West and Up")
send_global_velocity(SOUTH,WEST,UP,DURATION)
send_global_velocity(0,0,0,1)
print("Yaw 90 relative (to previous yaw heading)")
condition_yaw(90,relative=True)
print("Velocity North, West and Down")
send_global_velocity(NORTH,WEST,DOWN,DURATION)
send_global_velocity(0,0,0,1)
print("Set new home location to current location")
vehicle.home_location=vehicle.location.global_frame
print("Get new home location")
#This reloads the home location in DroneKit and GCSs
cmds = vehicle.commands
cmds.download()
cmds.wait_ready()
print(" Home Location: %s" % vehicle.home_location)
print("Yaw 90 relative (to previous yaw heading)")
condition_yaw(90,relative=True)
print("Velocity North and East")
send_global_velocity(NORTH,EAST,0,DURATION)
send_global_velocity(0,0,0,1)
print("Yaw 90 relative (to previous yaw heading)")
condition_yaw(90,relative=True)
print("Velocity South and East")
send_global_velocity(SOUTH,EAST,0,DURATION)
send_global_velocity(0,0,0,1)
"""
The example is completing. LAND at current location.
"""
print("Setting LAND mode...")
vehicle.mode = VehicleMode("LAND")
#Close vehicle object before exiting script
print("Close vehicle object")
vehicle.close()
# Shut down simulator if it was started.
if sitl is not None:
sitl.stop()
print("Completed")